

 English
English
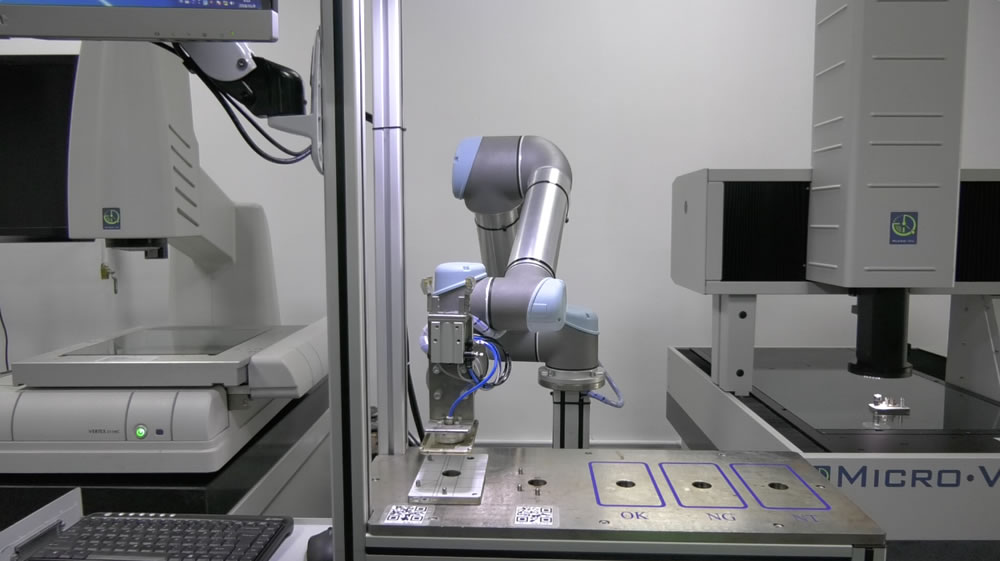
Cánh tay robot
Một cánh tay robot có thể được trang bị nhiều bộ máy đo hình ảnh Micro-Vu, để thực hiện các hoạt động xếp dỡ tự động.
Cánh tay robot nhận ra hoạt động tự động nạp và dỡ hàng của máy đo thông qua giao tiếp TCP / IP.
Một cánh tay robot có thể được trang bị nhiều bộ máy đo hình ảnh Micro-Vu khác nhau.
Tự động xếp dỡ.
Tự động nạp và dỡ hàng vào máy đo.
Đo lường tự động. Hệ thống gọi chương trình đo và hoàn thành phép đo một cách tự động.
Hệ thống đánh giá mẫu đo là NG hoặc OK tùy theo kết quả đo và đặt mẫu đo vào vị trí được chỉ định.
Tổng quan
Với sự tích hợp liên tục của quá trình thông tin hóa và công nghiệp hóa, và sự phát triển không ngừng của ngành sản xuất thông minh, ngành công nghiệp thông minh do cánh tay robot đại diện đang bùng nổ. Sự xuất hiện của các cánh tay robot công nghiệp đã giải quyết được vấn đề khó khăn về tuyển dụng do môi trường làm việc khắc nghiệt và cường độ lao động cao gây ra.
Sử dụng cánh tay robot thay vì người vận hành có thể tự động hoàn thành các nhiệm vụ xếp dỡ khác nhau như đo nắm, xếp và dỡ mảnh trong quá trình đo mảnh tự động, điều này có thể tiết kiệm đáng kể chi phí lao động và nâng cao hiệu quả sản xuất.
Đặc biệt đối với việc đo lường với số lượng lớn và các chi tiết nhỏ, yếu tố con người có ảnh hưởng rất lớn đến hiệu quả đo. Sử dụng một cánh tay robot với nhiều bộ máy đo, một người vận hành có thể điều khiển nhiều bộ máy đo cùng một lúc, thực hiện ít nhân hóa hơn trong việc kiểm soát chất lượng, do đó giảm chi phí sản xuất, nâng cao hiệu quả công việc và chất lượng sản phẩm, đồng thời nâng cao lợi ích kinh tế của công ty.
Để thực hiện việc nạp và dỡ hàng tự động của cánh tay robot, trước tiên nó phải có được thông tin về tín hiệu xếp dỡ do máy đo gửi đến. Sau khi thông tin được hệ thống điều khiển xử lý, nó sẽ xuất ra tín hiệu điều khiển để điều khiển cơ cấu chấp hành hoàn thành hành động tương ứng.
Làm thế nào để giải quyết việc truyền thông tin hiệu quả và đáng tin cậy giữa máy đo và cánh tay rô bốt là điều đặc biệt quan trọng để thực hiện việc nạp và dỡ hàng tự động của cánh tay rô bốt.
Cánh tay robot kẹp mẫu đo từ khay nguyên liệu và đưa đến bệ đo của máy đo. Nó hoàn thành việc đo mảnh theo chương trình đo được thiết lập trước. Sau khi đo xong, mảnh đo được đánh giá là NG hoặc OK theo kết quả đo, sau đó nó được đặt vào vị trí đã định.
Một cánh tay robot có thể được trang bị nhiều bộ máy đo để thực hiện vận hành tự động xếp dỡ, quản lý chất lượng sản phẩm, phân biệt và phân loại thông minh.
Trong toàn bộ quá trình, việc kẹp mảnh đo trên khay nguyên liệu, vị trí đặt trên bệ đo và khi bắt đầu chương trình đo đều cần nhận được chính xác tín hiệu lệnh từ cánh tay robot. Đồng thời, các thông tin như kết quả đo của máy đo có sai sót hay không cần được truyền chính xác đến cánh tay robot để đảm bảo toàn bộ quá trình diễn ra suôn sẻ.
Ứng dụng

Nâng cấp dây chuyền sản xuất đo lường | Robot tự động xếp và dỡ hàng

Ứng dụng lập bản đồ màn hình Knotless | Máy đo chính xác cao Micro-Vu

Ứng dụng trong đo lường tế bào quang điện | Máy đo quang học chính xác cao Micro-Vu
Tải xuống